Capacitated Vehicle Routing Problem Library
There is a library in AIMMS that solves a Capacitated Vehicle Routing Problem (CVRP). This article explains how to use that library in your own model. There are different ways to formulate a CVRP. In the CVRP library there are four options to choose from, which will be mentioned in this article.
Capacitated Vehicle Routing Problem
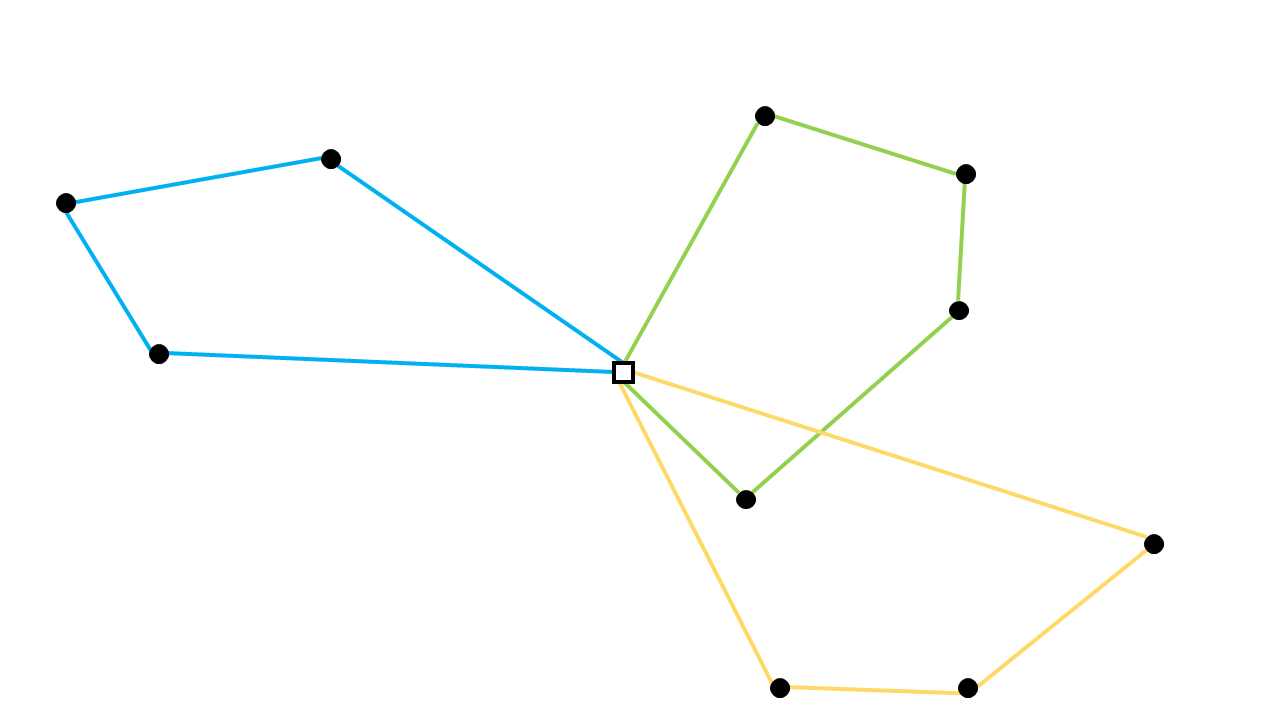
A CVRP deals with the following problem: a set is given with a depot and multiple costumers. The distances between their locations are known. A number of vehicles is available to serve the costumers. All costumers have a certain demand and the vehicles have the same maximum capacity. The shortest route for the vehicles must be found where all costumers get their demand. The vehicles all start and end at the depot.
How to Use the Library
You should add the library to your model, see more here.
One of the required input arguments is
s_Formulations. You should make this set a subset ofcvrpl::PossibleFormulations. Which is a set inside the library with all possible formulations.When you choose a formulation without time windows, the library can be called with the procedure
cvrpl::pr_NoTimeWindows. If you choose the formulation with time windows, the library can be called with the procedurecvrpl::pr_CVRPLibrary. They have the following input and output arguments:
cvrpl::pr_CapacitatedVehicleRoutingProblem
(s_Formulations, s_Nodes, p_NumberOfVehicles, p01_MaxorExact,
p_Distance, p_Demand, p_Capacity, p_TotalDistance, p01_x, p_BoundTotalDist,
sp_SolverStatus, sp_ProgramStatus, p_SolverTime);
cvrpl::pr_CapacitatedVehicleRoutingProblemTimeWindows(
s_Formulations, s_Nodes, p_NumberOfVehicles, p01_MaxorExact,
p_Distance, p_Demand, p_Capacity, p_TWLowerBound, p_TWUpperBound, p_ServiceTime,
p_TotalDistance, p01_x, p_StartServing, p_BoundTotalDist, sp_SolverStatus,
sp_ProgramStatus, p_SolverTime);
Input and Output Arguments
The input identifiers are:

s_Formulations-
s_Nodeswithiandjas indexes 
p_NumberOfVehicles-
p01_MaxorExactas a binary parameter -
p_Distance(i, j) -
p_Demand(i) -
p_Capacity(k) -
p_TWLowerBound(i)[1] -
p_TWUpperBound(i)[1] -
p_ServiceTime(i, j)[1]
s_Formulations should contain the formulation you want to use to solve the problem, choosing from:
Explicit Dantzig-Fulkerson-Johnson, Miller-Tucker-Zemlin, Implicit Dantzig-Fulkerson-Johnson or Time Windows
The set s_Nodes contains the depot and all costumers. p_MaxorExact is a binary parameter that indicates whether p_NumberOfVehicles is a maximum or an exact amount.
If p_MaxorExact is 0, then a maximum of p_NumberOfVehicles can be used. If p_MaxorExact is 1,
then exactly p_NumberOfVehicles should be used. p_Distance describes the distance between two nodes.
When there is no road between two nodes, you can just leave the value for that distance empty.
The output identifiers are:
-
p_TotalDistance -
p01_x(i, j, k)wherei <> jas a binary parameter -
p_StartServing(i)[2] -
p_BoundTotalDist 
sp_SolverStatus-
sp_ProgramStatus -
p_SolverTime
p_TotalDistance is the total distance of the shortest route. p01_x is a binary variable with a value of 1 if the road from i to j is in the shortest route and is driven by vehicle k. p_BoundTotalDist is the lower bound of the total distance. The last three arguments provide information on how the program was executed.
Note
[1] These input arguments are only necessary when you use time windows.
p_TWLowerBoundandp_TWUpperBoundindicate the time in between which a vehicle should arrive at nodei.p_ServiceTimedenotes the time it takes to get from nodeito nodej. It may include the service time at nodei.[2] The output argument
p_StartServingis only necessary when you use time windows. It denotes the time that a vehicle should arrive at nodei.
See also
The general formulation of a CVRP used in the library is described in Capacitated Vehicle Routing Problem formulation.
The four different formulations are explained in the following articles: Explicit Dantzig-Fulkerson-Johnson Formulation, Miller-Tucker-Zemlin Formulation, Implicit Dantzig-Fulkerson-Johnson Formulation and Time Windows.
The formulations comparison in Testing the Library.