Time Windows
The library in AIMMS that solves a Capacitated Vehicle Routing Problem (CVRP) has four different formulation options. One of them is called Time Windows and is an extension of the CVRP. Every customer then has a different time frame in which the goods have to be deliverd. The constraints for this formulation automatically eliminate subtours. That is why is isn’t nessecary to formulate any Subtour Elimination Constraints for a Vehicle Routing Problem with Time Windows (VRPTW). This article discusses the constraints for a VRPTW.
Constraints
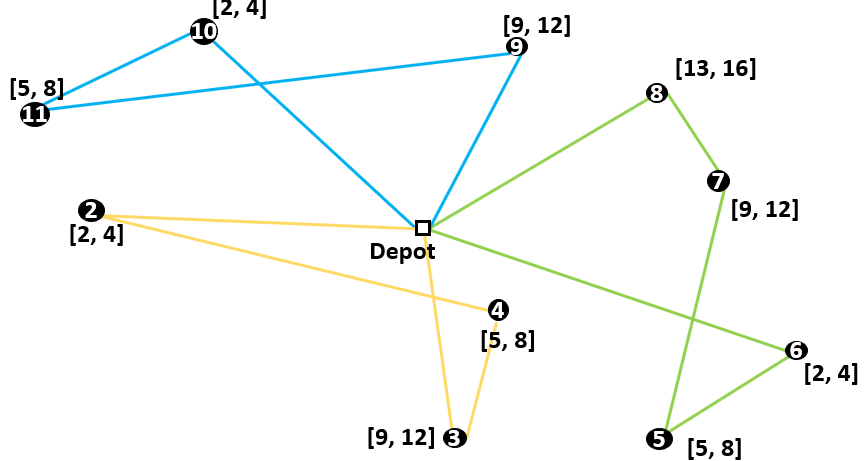
To formulate a VRPTW, some extra variables are needed. \([a_i, b_i]\) is the time window of customer \(i\). A vehicle must arrive at customer \(i\) at least at \(a_i\) and at most at \(b_i\). The time it takes to deliver the goods is irrelevant. \(t_{ij}\) denotes the time is takes to get from customer \(i\) to customer \(j\). Any service time at customer \(i\) is included. The variable \(s_i\) denotes the time that a vehicle starts serving customer \(i\) (which must be between \(a_i\) and \(b_i\)). These constraints can be formulated as follows:
Constraints (2) ensures that a vehicle can start serving a customer in the time window of that customer. Constraint (1) keeps track of the duration of the routes. If the arc \(x_{ijk}\) is in the route, the constraint can be rewritten to \(s_i + t_{ij} \leq s_j\). The start of the service time at customer \(j\) must be at least \(t_{ij}\) later than the start of the service time at customer \(i\). If the arc \(x_{ijk}\) is not in the route, Constraint (1) is still valid. The constraint can then be rewritten to \(s_i + t_{ij} \leq s_j + M\). The value of \(M\) is the maximum value of \(b_i + t_{ij} - a_i\), which is most amount of time possible between \(s_i\) and \(s_j\). These constraints are slightly similar to the constraints of the Miller-Tucker-Zemlin formulation. It is also not possible to return to a previously served customer. That’s because the time a customer is being served is always later than the previously served customers. So for a VRPTW it isn’t necessary to formulate subtour elimination constraints, while the time window constraints eliminate subtours automatically.
In the CVRP Library, the constraints are implemented in the section Time Windows Section.